I. Introduction générale▲
I-A. Objectif de l'article▲
Cet article est une introduction à bien lire avant d'entamer les
autres articles qui suivent (ou qui suivront), pour avoir les notions
de base et le vocabulaire qui seront nécessaires ensuite à la
compréhension de différents langages et cycles de fonctionnement
complexes assistés par automates.
Un minimum de connaissances en électronique est très souhaitable pour
débuter dans ce domaine d'automatisation. On va précéder par une
petite introduction du matériel et des différents éléments "Hard"
constituant l'API en générale.
I-B. Pré-requis▲
Les prochains tutoriaux d'automation vont traiter des langages automates
et de la configuration du matériel ainsi que l'installation et le
paramétrage de quelques outils de programmation d'API.
II. Introduction aux A.P.I▲
II-A. Un automate, c'est quoi ? ▲
L'automate programmable industriel (API), ou en anglais Programmable
Logic Controller (PLC), est une machine électronique programmable destinée
à piloter dans une ambiance industrielle
et en temps réel des procédés logiques séquentiels. Autrement dit, un utilisateur
(censé être un automaticien) l'utilise pour le contrôle et essentiellement la commande
d'un procédé industriel en assurant l'adaptation nécessaire entre tout ce qui est
de grande puissance par rapport à ce qui est de faible puissance côté commande.
Son objectif principal est de rendre tout le mécanisme de type "laisser-faire-seul" :
le système contrôle ses sorties, décide et agit sur ses entrées afin de maintenir
le fonctionnement comme prévu par l'utilisateur. C'est le principe de l'automatisme.
II-B. Principe de fonctionnement▲
L'automate programmable fonctionne par déroulement cyclique du programme.
Le cycle comporte trois opérations successives qui se répètent normalement
comme suit :
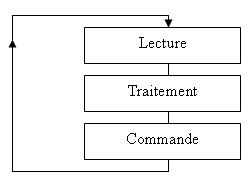
La lecture : la scrutation des entrées binaires pour transférer leurs
états dans la zone image des entrées.
Le traitement : le processeur exécute les instructions de la mémoire
programme en fonction des informations de la mémoire des données. Cette
exécution se traduit par la modification de certaines variables et leur
mise à jour dans la zone correspondante.
La commande : les images des sorties dans la mémoire des données
sont transférées dans le module de sortie pour être converti en
signaux électriques pour la commande des préactionneurs et des dispositifs
de visualisation. Ces valeurs sont verrouillées jusqu'au cycle prochain.
Ce cycle se répète infiniment tant qu'il n'y a pas d'interruption interne ou
externe qui engendre l'arrêt temporaire ou permanent de l'automate. A chaque
cycle seul, l'automate fait une mise à jour de ses données en entrée, garde cet
état des entrées et passe à la phase de traitement. Cette dernière phase nécessite
un temps prédéfini pour qu'elle se termine, dépendant de la fréquence du processeur
et de la technologie interne et de la nature du traitement aussi.
Une fois terminée, on est dans la troisième et finale phase de sortie,
où l'automate mets à jour ses signaux de sortie dépendant des résultats
obtenus lors du traitement des entrées. Ces sorties restent figées jusqu'au prochain cycle.
Chaque fois que l'on minimise le temps d'un cycle, on améliore l'efficacité
de notre automate. Malheureusement, le constructeur joue le rôle principal
dans ce cas puisqu'il fixe la fréquence interne en se référant au processeur
qu'il a utilisé. Mais l'utilisateur peut minimiser ce temps écoulé
en améliorant le coût de son algorithme.
Par exemple, le temps d'un cycle pour une TSX de faible gamme est de l'ordre
de 40ms. Et son temps de conversion par une voie peut atteindre 15ms.
II-C. Constitution▲
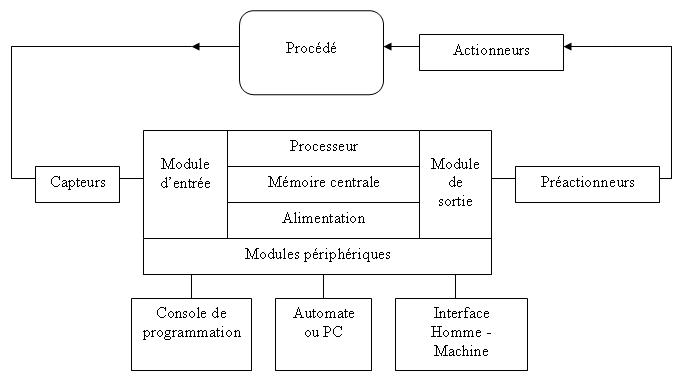
II-D. Quelques détails matériels ▲
- Unité centrale : constituée du processeur (cœur de l'automate) et de la mémoire centrale.

- Mémoire centrale : elle contient le programme moniteur, le programme utilisateur et les données.
Le programme moniteur est un logiciel de base gérant le fonctionnement de la machine et fourni par le constructeur.
Le programme utilisateur contient les instructions du programme à exécuter.
Les données sont réparties sur trois catégories :
- Variables images des entrées.
- Variables images des sorties.
- Variables internes : compteurs, temporisateurs, bits internes, etc.
- Module d'entrée : il transforme les signaux provenant des capteurs et
des ordres de l'opérateur en signaux compréhensibles par l'automate. Le processeur
stocke ensuite ces informations dans la mémoire de données image des entrées afin de
les mémoriser.
- Module de sortie : il transmet aux préactionneurs et aux dispositifs de
dialogue les ordres de commande et de signalisation résultants de l'exécution du programme.
Le processeur vient chercher ses ordres dans la mémoire de données image des
sorties, et les transferent en module de sortie qui seront transformés en signaux
électriques par la suite.

- Module de communication : sert pour le dialogue entre l'automate
et un autre équipement (automate, PC, …etc.). L'exemple de : ModBus,
ModBus Plus, Profibus, InterBus, DeviceNet, LonWorks, Ethernet, FIPIO,
FIPWAY, RS232, RS-485, AS-i, CANopen.
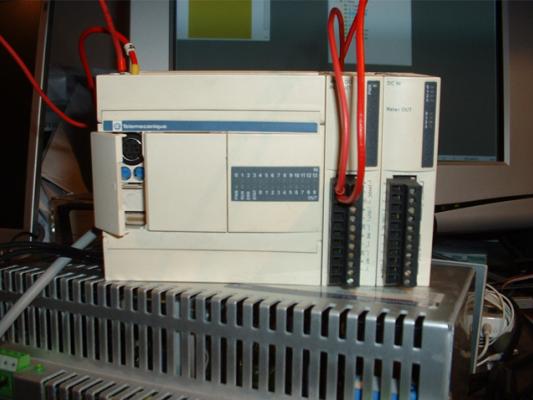
II-E. Le cas réel▲
II-F. Les entrées-sorties ▲
Il existe deux sortes de signaux E/S :
>> Les E/S TOR : le mot TOR vient de "Tout Ou Rien" qui représente les signaux
logiques. Les dispositifs d'entrée binaire réalisent, outre l'acquisition de
l'information, les opérations suivantes :
- Mise en forme du signal (calibrage)
- Filtrage (élimination des parasites)
- Isolation (galvanique ou par lumière)
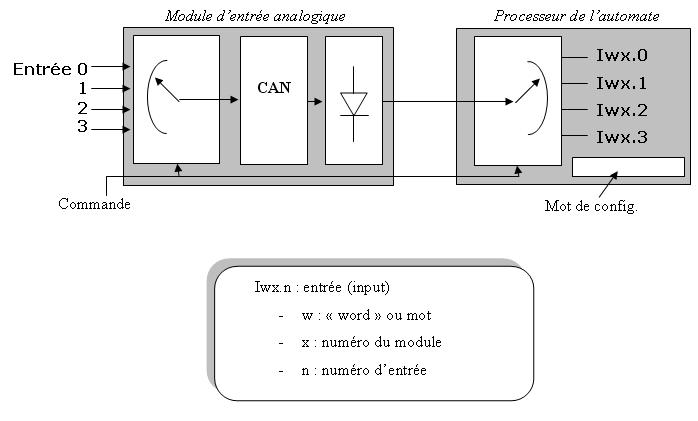
>> Les E/S analogiques : Les entrées analogiques transforment une grandeur
analogique variant d'une façon continue en un code numérique, généralement
sur 11 bits plus un bit de signe. Ces entrées disposent d'un seul convertisseur
A/N (CAN), elles sont scrutées les unes à la suite des autres par un multiplexeur
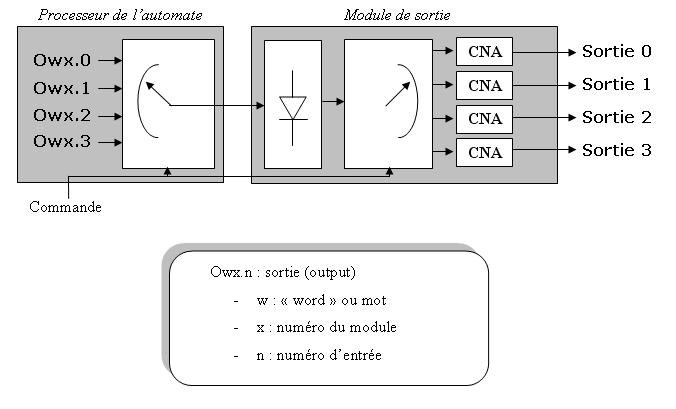
(MUX). Par contre, les sorties analogiques disposent d'un seul convertisseur par voie.
Les E/S analogiques sont caractérisées par l'amplitude du signal (VH et VL),
par la vitesse de conversion et par la grandeur électrique (courant ou tension).
Il existe, au niveau des entrées, trois types d'entrées analogiques :
- Haut niveau : 0-10V, 0-20mA, 4-20mA
- Pour thermocouple : 0-20mV, 0-50mV, 0-100mV
- Pour sondes Pt100 : 0-100mV, 0-250mV, 0-400mV
De même, les sorties analogiques peuvent être différenciées selon ces intervalles :
0-10V, 0-5V, ±10V, ±5V, 0-20mA, 4-20mA.
La conversion des signaux analogiques :
Ce module comporte quatre voies et un seul convertisseur Analogique Numérique.
Chaque voie est traitée seule grâce au multiplexeur associé. Le temps de
conversion par voie dépend du convertisseur et donc de l'automate. Dans
l'exemple de l'automate TSX 17-20, ce temps atteint 15ms ; donc le temps de
conversion total est de : 4 * 15 = 60ms.
Pour bien évaluer la performance d'un automate en se basant sur sa rapidité
critique, on est appelé à calculer son temps de conversion effectif comme suit :

AN : on a, pour le TSX 17-20, Tcycle = 40ms et Tconv.total = 60ms alors :
Tconv.effect = 40 * (1 + partie entière (60 / 40)) = 2 * 40 = 80ms.
II-G. Les modules de comptage et la temporisation ▲
Les fonctions de comptage et de temporisation peuvent être
réalisées par l'unité centrale de l'automate sous forme de programme.
Mais, avant l'apparition des processeurs "rapides" actuels,
elles étaient souvent implantées sur des cartes électroniques
appelées "modules".
Le comptage matériel s'impose lorsque la vitesse d'acquisition est très élevée.
Un module de comptage comporte un compteur/décompteur dont le contenu est
incrémenté ou décrémenté par des impulsions en provenance de l'extérieur.
Un registre auxiliaire de pré-assignation sur lequel il est possible
de fixer la limite du comptage par programme ou par un bouton externe.
La temporisation matérielle est assurée à partir d'impulsions fournies par
une horloge à quartz (base de temps "TB"). Il s'agit d'un compteur
d'impulsion de délai de temporisation et réglable par potentiomètre.
Un temporisateur permet essentiellement la commande avec retard des actions spécifiques.
Le choix de temporisateur s'effectue aussi par logiciel à l'aide d'une
console ou d'un ordinateur. La manière dont on réalise le choix dépend
de la marque de l'automate, donc chaque constructeur défini sa propre méthode.
Par exemple, si on pose TBi le temps de base d'un timer "i", alors pour un automate :
- Télémécanique : On peut varier TBi, et la période de ce timer sera définie comme suite : T = TBi * TPi ; où TPi est une valeur à saisir par l'utilisateur.
- OMRON : dans ce cas, TBi est toujours fixe de valeur 0,1 seconde. Et on ne peut changer que la valeur de TPi. La période sera calculée comme décrit précédemment.
- Siemens : la base TBi est figée aussi, mais chaque groupe de timer a sa propre valeur fixe de TB. Et de la même manière on calcule T.
Le nombre des temporisateurs varie selon l'automate. Par exemple,
dans le cas d'un TSX 17-20, on a 32 timer, de T00 à T31. La valeur de
TPi varie aussi de 0000 à 9999 et TBi peut avoir ces valeurs : 10ms, 100ms, 1s, 1min.
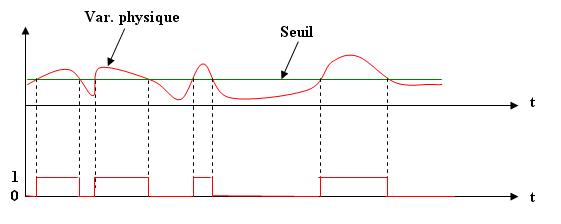
II-H. Les entrées à seuil ajustable ▲
Les anciennes gammes d'automates pouvaient accueillir un type
de carte connu sous le nom de : "carte d'entrée à seuils ajustable" .
Ces entrées détectent le franchissement d'un seuil sur une
grandeur physique continue. Le réglage du seuil est assuré par
programme ou par potentiomètre.
Exemple :